|
I am a master's student with Dr. Kaushik Mitra at IIT Madras, where I work on computational imaging, deep learning and image processing. At Computational Imaging lab , I've worked on deep learning based solutions for image restoration in compressive imaging setups like Single Pixel Camera, compressive light field reconstruction and RGBD priors. Prior to this I got my B. Tech in Electronics and Communications from RGUKT, Basar in 2015. Our project titled "Deep Generative Models for Computational Imaging" received Qualcomm Innovation Fellowship (QInF), India 2016 and Super winner for the consecutive year 2017 among four prestigious projects. Email / CV / Google Scholar |

|
|
News:
|
|
I'm interested in computational photography, image processing, optimization, and machine learning. Much of my recent work has focused on using deep generative modesl for inverse problems in computational imaging. |
 |
We provide a learning algorithm for light field reconstruction from a conventional camera. |
|
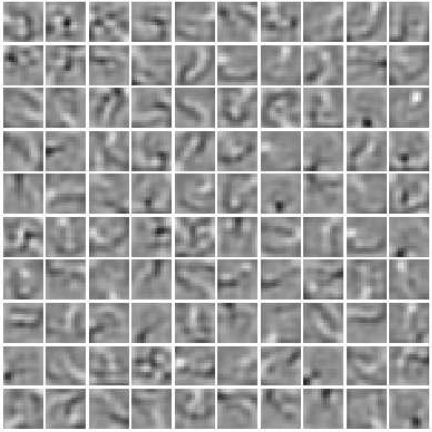
We use a deep autoregressive image prior PixelCNN++ for solving inverse imaging problems. Since autoregressive nature explicitly models pixel level dependencies it reconstruct pixel level details much better than existing state of the art methods. |
 |
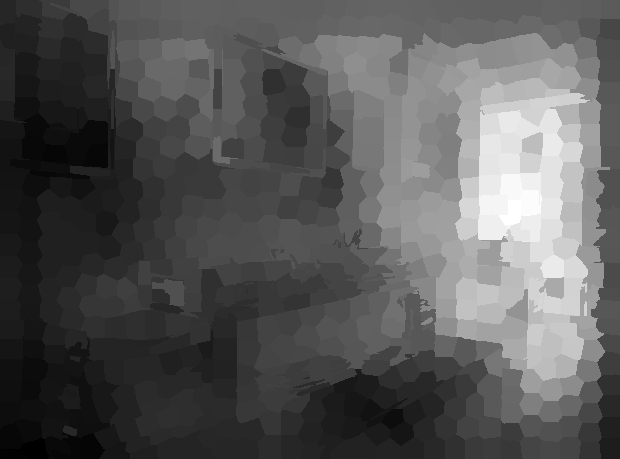
Using deep neural networks we reconstruct full sensor resolution light field from a single coded image. Our approach involves depth based rendering where depth is learnt in an unsupervised manner. |
|
We use a deep recurrent image prior, RIDE, which can model long range dependencies in images very well. Using this for compressive image recovery we show much better reconstructions especially at lower measurement rates. |
|
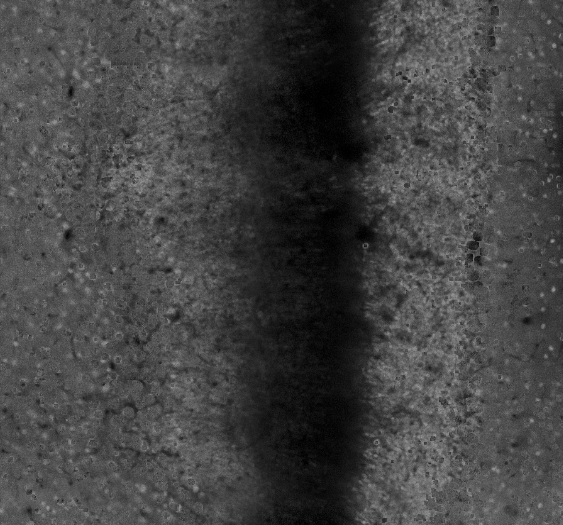
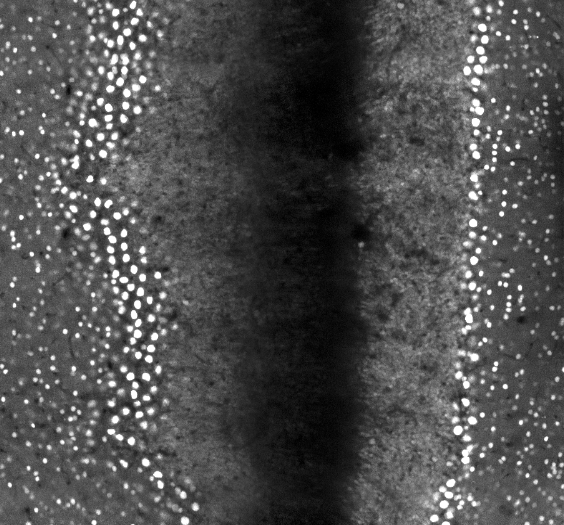
We use a deep autoencoder with adversarial loss for denoising the gene expression to improve the registration accuracy. |
|
We show mathematical models of communication mechanisms debloyed by butterflies. This work is extended to an optimization algorithm, Butterfly Mating Optimization (BMO), Jada et al. 2015. We applied it for image clustering application. |
 
|
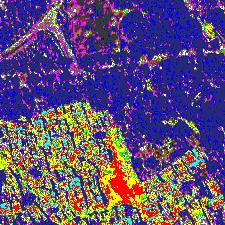
Neural networks are used to learn the navigation information. For outdoor navigation, we propose an image processing pipeline for road detection. |
|
|
|
|
 |
|
|
|