This project is a part of an Inter-Disciplinary Research Project at IIT Madras involving the Transportation, the Civil, the Electrical, and the Computer Science Departments. Traffic Monitoring is a vital part of transport planning. Human observers are currently used but this approach is time-consuming and inefficient. The aim of our part of the project is to develop an automated vision system for monitoring traffic movements. The objectives to be realized are:
À Extraction of traffic parameters such as type of vehicle, its velocity, traffic volume, flow rate, headway, etc.
À Incident detection such as traffic jam or accident.
À Issue alerts over a wireless link.
À Maintenance of traffic database.
Using images captured from an overhead camera installed at a signal junction, the following steps are carried out.
À Detect independently moving objects.
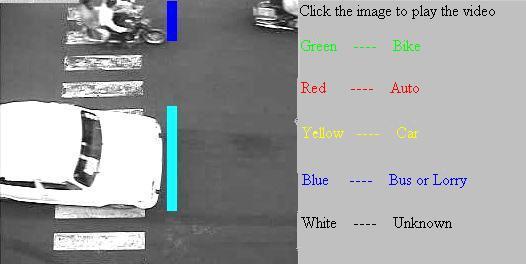
À Classify a vehicle based on its length and width.
À Compute all relevant traffic parameters.
Fig 1. Vehicle classification based on the length and width.
A Low-cost Vision System for Traffic Analysis
We have built a low-cost vision system for monitoring traffic on Indian urban roads. Specific tasks include traffic data measurement, vehicle classification, and incident detection. The goal is to enable an adaptive and efficient use of our transportation network for reducing congestion. We have developed image processing algorithms for vehicle detection and classification. This is based on the `tripline' concept. The motion information is used to segment moving objects and the edges of these objects are used to build an activity matrix. This is followed by data association wherein the same label is assigned to all the activity elements in the matrix belonging to one vehicle. This leads to the generation of a `label map' where different vehicles have different labels. The labeling process is designed to handle occlusions and closely moving objects. Using the block-matching principle, speed of each vehicle is computed. Vehicle classification is done based on the estimated length and width of a vehicle. The algorithm works in the presence of shadows too. We can classify vehicles as bikes, autos, cars, vans and buses/trucks. The algorithms have been ported onto the ADSP EZ kit as well as to a Netcam board. We will eventually use the Netcam board as it has excellent communication capabilities. It can also compress videos for transmission. When tested on real traffic sequences the classification accuracy with and without shadows is 91% and 89%, respectively.


(a) (b)
Fig 1. (a) Netcam board with a bullet finger camera (b) Ezkit with a camcorder